Soil Salinity in Agriculture: How to Measure, Manage, and Prevent Yield Loss with Real-Time Data
What Is Soil Salinity?
Soil salinity is one of the most persistent and costly threats to agricultural productivity, especially in irrigated systems. Excess salts restrict water uptake, disrupt nutrient availability, and degrade soil structure over time. This article explores what soil salinity is, how it impacts crops and soil health, proven methods to remove and prevent salt buildup, and how real-time, in-ground monitoring of soil moisture, salinity, nitrate, and redox potential (ORP) enables precision salinity management for long-term resilience and yield protection.
Soil salinity refers to the concentration of soluble salts, such as sodium, chloride, calcium, and magnesium, in the soil profile. These salts originate from irrigation water, fertilizers, soil parent material, or rising saline groundwater.
Salinity is commonly measured as electrical conductivity (EC), which reflects the total dissolved salts present in soil water.
Key Terms: Saline Soil and Salinization
- Saline soil: Soil with elevated salt concentrations that reduce crop productivity.
- Salinization: The process by which salts accumulate in the soil over time, often driven by irrigation practices, poor drainage, or insufficient leaching.
Why Soil Salinity Matters in Agriculture
Salinity directly interferes with a plant’s ability to extract water from the soil. Even when soil moisture appears adequate, high salinity increases osmotic stress, causing crops to behave as though they are drought-stressed. For high-value specialty crops and irrigated row crops alike, un-managed salinity translates to yield loss, quality degradation, and reduced nutrient use efficiency.
Impact on Crop Growth and Yield
Elevated soil salinity:
- Reduces root water uptake
- Limits nitrate and nutrient availability
- Suppresses germination and early vigor
- Decreases yield and crop uniformity
Salt-sensitive crops such as almonds, grapes, potatoes, and many vegetables experience yield impacts at relatively low EC thresholds.
Effects on Soil Health and Structure
Excess sodium can destabilize soil aggregates, leading to:
- Reduced infiltration and drainage
- Surface crusting
- Compaction and root restriction
Over time, this creates a feedback loop where poor structure accelerates further salinity buildup.
Long-Term Consequences of Salinization
If left un-managed, salinization results in:
- Chronic yield decline
- Increased leaching risk to groundwater
- Higher fertilizer inputs with diminishing returns
- Permanent loss of productive capacity in severe cases
Methods of Removing Salt from Soil
Physical and Chemical Approaches
- Leaching: Applying sufficient high-quality water to move salts below the root zone
- Drainage improvement: Preventing saline water tables from rising
- Soil amendments: Gypsum to displace sodium and improve structure where appropriate
The effectiveness of these methods depends heavily on timing, water movement, and soil redox conditions.
Bioremediation and Biological Support
- Organic matter additions improve aggregation and infiltration
- Microbial activity supports nutrient cycling and soil resilience
- Balanced nitrogen management prevents excess salt loading from fertilizers
Cover Crops and Irrigation Management
Cover crops enhance infiltration and reduce evaporation, limiting surface salt accumulation. Precision irrigation, applying the right amount at the right time, is critical to moving salts without over-leaching nutrients.
This is where continuous soil moisture and salinity data becomes essential.
Conducting a Soil Salinity Experiment
Setting Up the Experiment
A practical soil salinity experiment includes:
- In-ground sensors measuring soil moisture, EC (salinity), nitrate, temperature, and ORP
- Multiple depths to understand salt movement through the root zone
- Side-by-side irrigation or amendment treatments
Measuring Soil Salinity Levels
Traditional soil tests provide snapshots. In contrast, continuous monitoring reveals:
- How salinity responds to each irrigation or rainfall event
- Whether salts are accumulating, holding, or flushing
- The interaction between moisture status, nitrate availability, and redox conditions
Interpreting Results and Implications
By pairing salinity data with soil moisture and ORP:
- Growers can confirm whether leaching events are effective
- Agronomists can avoid pushing nitrate below the root zone
- Decisions shift from assumption-based to evidence-based
This transforms salinity management from a seasonal guess to a controlled process.
Preventing Soil Salinization
Best Practices for Soil Management
- Match irrigation volume to crop demand and soil holding capacity
- Avoid shallow, frequent irrigation that concentrates salts
- Monitor fertilizer timing and form to reduce salt loading
Role of Crop Rotation and Diversity
Rotations and deep-rooted crops improve soil structure and water movement, reducing salinity risk over time.
Monitoring and Maintaining Soil Health with Real-Time Data
Preventing salinization requires early detection, not post-damage correction. Continuous measurement of:
- Soil moisture shows whether water is moving or stagnating
- Salinity (EC) reveals salt accumulation trends
- Nitrate indicates nutrient retention versus loss
- ORP (redox potential) highlights biological and chemical conditions affecting nutrient transformations
Together, these signals enable proactive management—adjusting irrigation, nitrogen strategy, and leaching before salinity becomes yield-limiting.
Closing Perspective
Soil salinity is not a one-time problem, It is a dynamic process driven by water, nutrients, and soil chemistry. Managing it effectively requires more than occasional soil tests. With real-time, in-ground insight into soil moisture, salinity, nitrate, and ORP, growers gain the visibility needed to protect yield, improve nutrient use efficiency, and sustain soil health for the long term.
Where Soil Salinity Is Most Common in Agriculture
Soil salinity is not limited to one crop or region, it is a widespread challenge in irrigated and semi-arid agricultural systems worldwide. Salinity risk increases wherever evaporation exceeds rainfall, irrigation water contains dissolved salts, or drainage is constrained.
Key Agricultural Regions Affected by Soil Salinity
Arid and Semi-Arid Production Regions
Low rainfall limits natural salt leaching, making these regions highly dependent on irrigation management. Salinity commonly accumulates in the root zone without intentional flushing.
Intensively Irrigated Valleys and Basins
Areas with long histories of irrigation often experience rising salinity due to:
- Repeated application of saline or moderately saline water
- Shallow groundwater tables
- Limited drainage capacity
Coastal Agricultural Zones
Salt intrusion from seawater, often driven by groundwater pumping, can elevate soil and irrigation water salinity, particularly in high-value specialty crop systems.
Closed or Restricted Drainage Systems
Regions where drainage water cannot easily exit the landscape are especially vulnerable to salinity buildup over time, even when best management practices are followed.
High-Input Cropping Systems
Repeated fertilizer applications, especially nitrogen sources, contribute to salt loading. Without adequate monitoring, salinity can increase even when yields appear stable in the short term.
Why Regional Awareness Matters for Salinity Management
While the mechanisms of salinity are universal, the rate and severity of accumulation vary by climate, soil type, water source, and management practices. This variability is why snapshot soil tests alone often miss emerging problems.
Continuous measurement of:
- Soil moisture movement
- Salinity (EC) trends
- Nitrate retention or loss
- Redox conditions (ORP)
allows growers and agronomists to detect salinity risk early, regardless of region, and adapt irrigation and nutrient strategies before yield is compromised.
How Real-Time Soil Data Improves Salinity Management
Soil salinity management depends on understanding how water and salts move through the root zone—not just what a soil test shows at one moment in time.
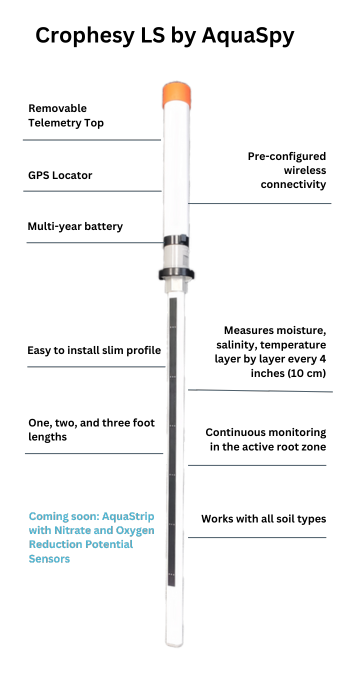
AquaSpy’s underground weather technology continuously measures:
- Soil moisture to track water movement and leaching effectiveness
- Soil salinity (EC) to detect salt accumulation or flushing
- Nitrate availability to avoid nutrient loss during leaching events
- Redox potential (ORP) to understand biological and chemical soil conditions
By monitoring these variables together, growers and agronomists can:
- Time leaching events more precisely
- Confirm whether salts are actually moving below the root zone
- Prevent excess irrigation that drives nitrate loss
- Identify salinity risk early—before yield is impacted
The result is salinity management based on process control, not assumptions.
Learn how continuous soil monitoring supports smarter irrigation and nutrient decisions.