AquaSpy Announces Crophesy LS for Water and Nutrient Use Efficiency
First continuous, in ground system for monitoring NO3– usage by crops
SAN DIEGO, CA – (10 March 2025) Ag Information company AquaSpy announced Crophesy LS, the next generation of its Crophesy crop and soil intelligence data collection system.
Beginning in April, AquaSpy is conducting 400 controlled water and nitrate management pilots across a wide variety of crops and growing regions, in collaboration with leading growers, agronomy service providers and input manufacturers. The objective is to develop specific use cases for commercial validation. Crophesy LS, with its modular, slim design and revolutionary AquaStrip™ sensors is anticipated for general availability after the pilot completion later this year. The revolutionary modular design probe captures soil moisture as well as NO3 and Redox data via an external AquaStrip™ nutrient sensor array, delivering the world’s first integrated continuous inground monitoring for Water, Nitrate (ppm NO3-N) and Oxygen Reduction Potential (ORP/Redox).
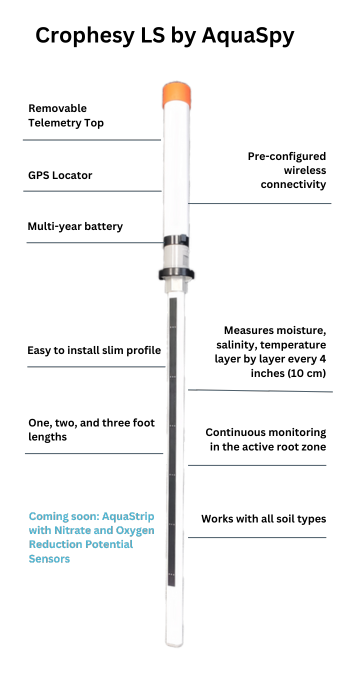
Crophesy LS has a modular two-part probe design for fast and easy installation. The removable telemetry top and slim 1.3 inch (33 mm) diameter probe bottom comes in one, two, or three foot probe lengths with moisture, temperature, and salinity sensors spaced every four inches (10 cm) to accommodate a multitude of irrigated or dryland crops and soil types. Telemetry includes an enhanced performance wideband antenna optimized for rural growing regions and TEAL eSIM designed for optimum connectivity in remote agricultural environments, with the ability to connect with over 3,500 global carriers.
For more information about Crophesy LS, Contact AquaSpy